 İnce Satırlar
İnce Satırlar Liste Modu
Liste Modu Döşeme Modu
Döşeme Modu Sade Döşeme Modu
Sade Döşeme Modu Blog Modu
Blog Modu Hibrit Modu
Hibrit Modu
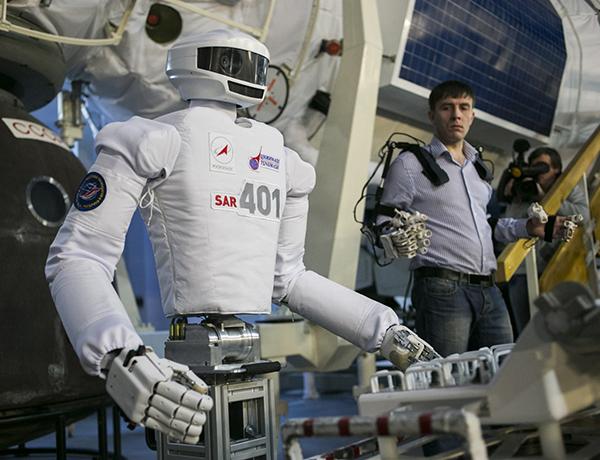
Uluslararası Uzay İstasyonu (ISS) bünyesinde görev yapan astronotlar, özellikle istasyon dışı görevler sırasında birçok hayati tehlike ile karşı karşıya kalabiliyorlar. Bu sorunların önüne geçmek için ABD Ulusal Havacılık ve Uzay Dairesi NASA'nın kısa süre önce yeni bacak sistemini tanıttığı Robonaut benzeri yapıda Rusya tarafından hazırlanan robot kozmonot SAR-401, ISS dışı görevler için son aşamaya gelmiş durumda.
Uluslararası Uzay İstasyonu'nun dışarısında görev yapmak üzere geliştirilen robot kozmonot SAR-401, özel kontrol mekanizmaları giyen istasyon görevlileri tarafından yönetiliyor ve bu sayede sabit dahi olsa riskli uzay yürüyüşlerine karşı oldukça iyi bir alternatif daha getirmiş oluyor. Aşağıda yer alan videoda da rahatlıkla görebileceğiniz üzere oldukça hassas el harekleri ortaya koyabilen SAR-401, 2013 başından beri geliştiriliyor ve şuanda son saha testleri gerçekleştiriliyor.
Araştırma geliştirme çalışmaları devam eden robot kozmonot SAR-401, üretici Android Technics firmasının başında bulunan Vyacheslav Sychkov'a göre ABD'nin Robonaut modeli negöre çok daha ucuza üretilebiliyor. Robotun çalışma sürecini ve performasını aşağıda yer alan video vasıtasıyla rahatlıkla görebilirsiniz.
istediğiniz zaman (çevrim dışı bile) okuyabilirsiniz:








