
 İnce Satırlar
İnce Satırlar Liste Modu
Liste Modu Döşeme Modu
Döşeme Modu Sade Döşeme Modu
Sade Döşeme Modu Blog Modu
Blog Modu Hibrit Modu
Hibrit Modu
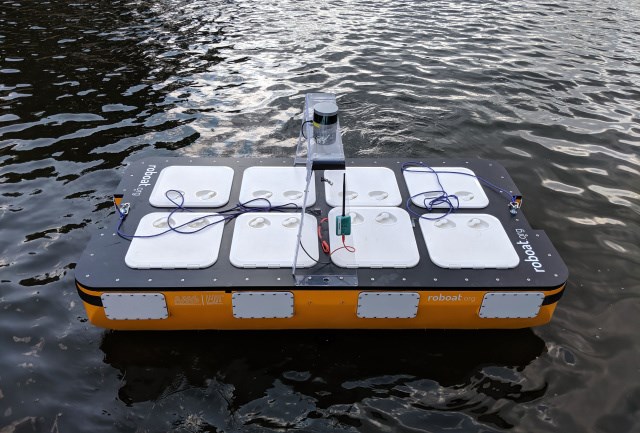
MIT'nin Bilgisayar Bilimi ve Yapay Zeka Laboratuvarı'ndaki(CSAIL) araştırmacılar, yolcu taşıma kapasitesine sahip Roboat II'yi tanıttı.
Son beş yılda CSAIL, MIT Senseable City Lab ve Amsterdam Institute for Advanced Metropolitan Solutions(AMS) tarafından geliştirilen otonom tekne filosuna yapılan en son ekleme olan Roboat II, 0.17 metrelik hata payı ile başlangıç konumuna dönmeden önce Amsterdam kanallarında üç saat boyunca başarılı bir şekilde gezindi. MIT'nin otonom tekne filosu projesi için önemli bir adım olan Roboat II, daha önce üretilen 1 metrelik kardeşinden iki kat daha uzun ve onun aksine yolcu taşıma kapasitesine sahip.
Otonom tekne filosu için önemli adım
2 metre uzunluğunda ve 50 kg ağırlığındaki Roboat II'nin yeni yazılımı nakliye için optimize edildi. Örneğin, bir yolcuyu almak için, teknenin sistem koordinatörü yakındaki, boş bir tekneyi o kişiyi alması için görevlendirir. Tekne de yoüunluğa bağlı olarak bir rota oluşturur.
Roboat II, karada kendi kendine giden bir arabanın yapacağı gibi, LiDAR ve GPS sensörleri ile birlikte yolu üzerindeki engellerden kaçınmak için bir atalet sensörü kullanıyor. Ayrıca Roboat II, herhangi bir yönde hareket edebilmek için dört pervaneye sahip.
MIT profesörü ve CSAIL direktörü olan Daniela Rus, yaptığı açıklamada: "Roboat II, kendi kendine giden arabalarda kullanılanlara benzer algoritmalar kullanarak otonom bir şekilde geziniyor. İnsanları ve malları teslim edebilen ve diğer Roboat'larla bağlantı kurarak su faaliyetlerini mümkün kılacak bir dizi otonom platform oluşturabilen Roboat filoları geliştiriyoruz." ifadelerine yer verdi.

Roboat II, büyüyen filodaki yarı ölçekli olan teknedir ve önceden geliştirilmiş 1 metre uzunluğundaki çeyrek ölçekli Roboat'a katılır. Amsterdam'da yapımı devam eden ve tam ölçekli olarak kabul edilen üçüncü tür Roboat, 4 metre uzunluğunda ve dört - altı yolcu taşıma kapasitesinde olacak.
Projenin ana hedefleri, atık toplama, eşya teslim etme ve insan taşımacılığı görevlerinin sorunsuz gerçekleştirilmelerini sağlamak.
Ekip, gelecekte robotların temel parametrelerini tahmin etmek için çevrimiçi makine öğrenimini kullanmayı planlıyor. Ayrıca, tekneye nesneler yerleştirildiğinde yapıda dinamik değişikliğe izin veren uyarlanabilir kontrolörleri tekneye entegre etmeyi hedefliyorlar. Sonunda tekneler, güçlü akıntılar ve dalgalar gibi önemli paramatrelerin olduğu dış su ortamlarına da genişletilecek.
Bu haberi ve diğer DH içeriklerini, gelişmiş mobil uygulamamızı kullanarak görüntüleyin:









Türkiyede gelmez malsesef gelse bile 1,2m den aşağı sattırmazlar. Bize ucuz araba haram çünkü [resim]
Hafif araç çitlenbik gibi, ne yalan söyleyeyim araç çok hoşuma gitti, şehir içinde ideal bir araç
bence pastadan ciddi bir pay alabilir
hiç fena değil evin 2. arabası olur
evin 2. arabası olur